

 QQ
QQ 微信
微信

描述S7-1500T CPU的运动系统工艺对象(TO_Kinematics)可以激活运动过程中的动态调整功能。当动态调整激活时,根据运动系统运动的动态设定值,动态预设值和动态限值以及运动系统轴的*大速度、*大加速度、*大减速度计算出运动学系统移动的速度曲线。另外,方向轴运动的运动动态预设值和速度、加速度、加速度的动态限制也被考虑在内。对于动态调整,运动控制指令有三个设置选项:
· 无动态调整
· 轨迹分段动态调整
· 不进行轨迹分段动态调整
此外,动态调整可以在“工艺对象>组态>扩展参数>动力学”中进行预设置。在此对话框中设置选项的命名与运动控制指令的设置选项不同。设置选项的顺序和定义与运动控制指令设置选项相对应。可设置如下:
不限制
带有路径分段限制
不带路径分段限制
设置“不进行轨迹分段动态调整”,计算速度曲线时考虑到适用于整个运动控制指令的约束条件。
设置"轨迹分段”时,运动控制指令被分为等距段。对每一段,计算速度曲线时所考虑的限制条件适用于所对应的段。因此路径的动态限值按照运动控制指令的每一段进行调整。这样在某些分段中能够以较高的速度运行,进而缩短运动控制的运行时间。设置"轨迹分段动态调整”会导致计算时间显著增加。
默认设置是“不进行轨迹分段动态调整”。切换为“轨迹分段动态调整”时可能会导致MC-Interpolator(OB92)溢出。可以通过增加MC-Servo(OB91)的应用循环时间来防止溢出。
增加应用循环时间增加MC-Servo(OB91)的应用循环时间
在项目中右键点击"MC-Servo",在下拉菜单中选择属性条目。
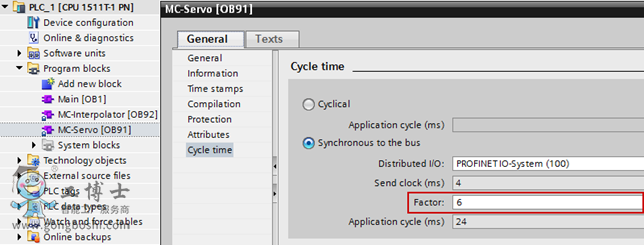
“在常规”选项卡中选择“周期”
如选择的是“循环”,直接输入更大的数值来增加应用循环时间;如选择的是“同步到总线”在“因子”的下拉列表中选择一个更大的数值来增加应用循环时间。
CPU 1511 T/TF和CPU 1515 T/TF控制器可能需要22ms或者更高的应用循环时间。
使用性能更好的控制器对于带有路径分段限制,可考虑使用CPU 1516 T/TF、CPU 1517 T/TF或者CPU 1515 SP PC2 T/TF。对于这些控制器,应用循环时间也可能需要增加。
创建环境FAQ中所用截图是在STEP 7(TIA Portal)V15.1版本下创建的。
运动机构工艺对象中设置“动态调整带路径分段“功能要比默认设置的“动态调整不带路径分段“功能占用更多计算时间。在选择CPU或者设置应用循环时间时都需要注意这一点。
描述S7-1500T CPU的运动系统工艺对象(TO_Kinematics)可以激活运动过程中的动态调整功能。当动态调整激活时,根据运动系统运动的动态设定值,动态预设值和动态限值以及运动系统轴的*大速度、*大加速度、*大减速度计算出运动学系统移动的速度曲线。另外,方向轴运动的运动动态预设值和速度、加速度、加速度的动态限制也被考虑在内。对于动态调整,运动控制指令有三个设置选项:
· 无动态调整
· 轨迹分段动态调整
· 不进行轨迹分段动态调整
此外,动态调整可以在“工艺对象>组态>扩展参数>动力学”中进行预设置。在此对话框中设置选项的命名与运动控制指令的设置选项不同。设置选项的顺序和定义与运动控制指令设置选项相对应。可设置如下:
不限制
带有路径分段限制
不带路径分段限制
设置“不进行轨迹分段动态调整”,计算速度曲线时考虑到适用于整个运动控制指令的约束条件。
设置"轨迹分段”时,运动控制指令被分为等距段。对每一段,计算速度曲线时所考虑的限制条件适用于所对应的段。因此路径的动态限值按照运动控制指令的每一段进行调整。这样在某些分段中能够以较高的速度运行,进而缩短运动控制的运行时间。设置"轨迹分段动态调整”会导致计算时间显著增加。
默认设置是“不进行轨迹分段动态调整”。切换为“轨迹分段动态调整”时可能会导致MC-Interpolator(OB92)溢出。可以通过增加MC-Servo(OB91)的应用循环时间来防止溢出。
增加应用循环时间增加MC-Servo(OB91)的应用循环时间
